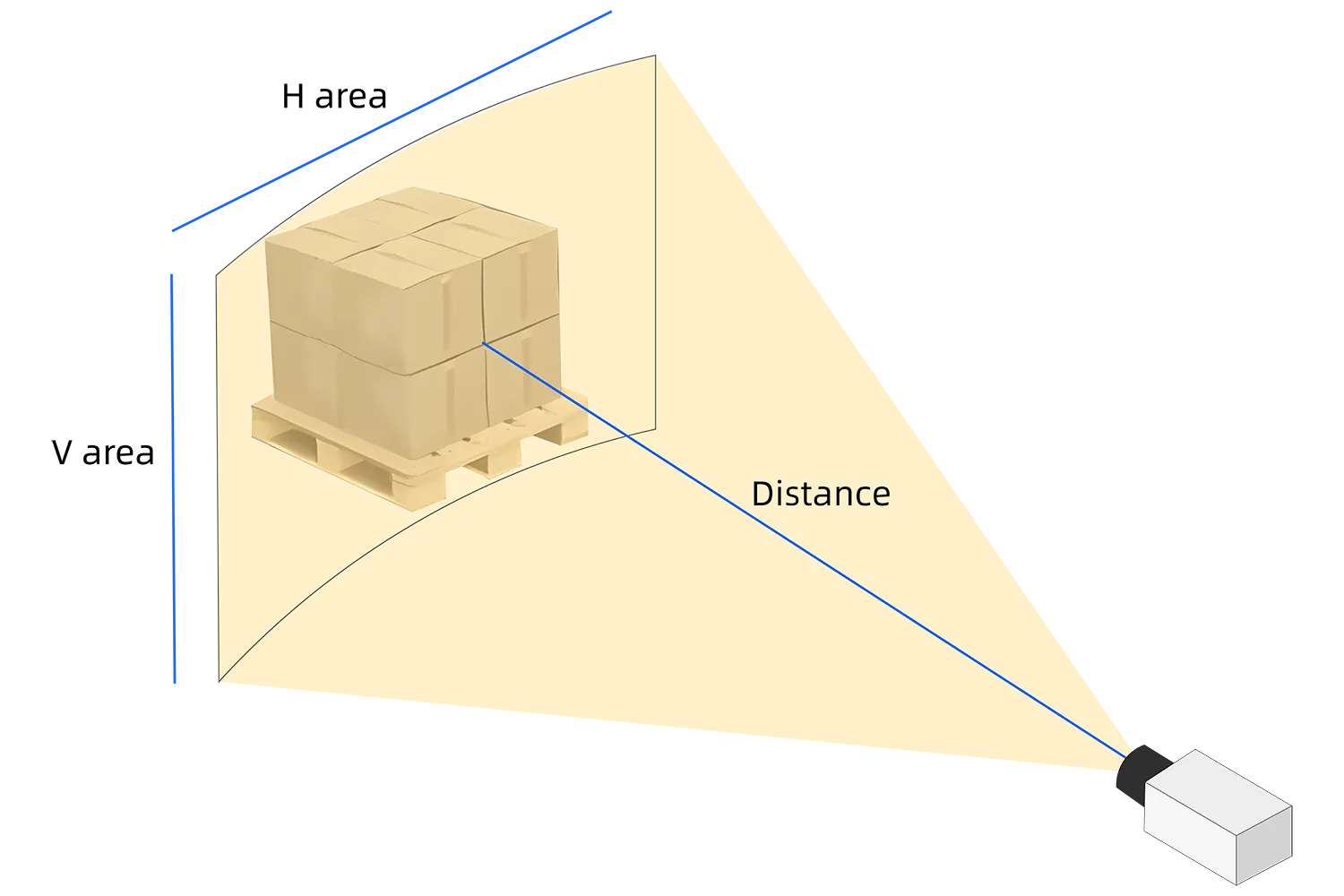
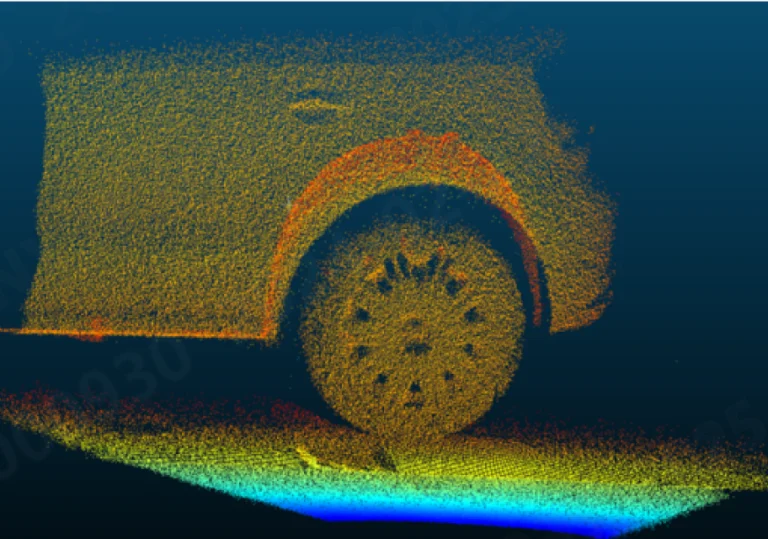
MRDVS迈尔微视 S系列视觉避障相机 dToF 激光雷达 + 视觉融合 专为移动机器人设计的工业级避障视觉传感器,通过高性价比方案提供宽广视场角与环境感知能力,为移动机器人的避障应用提供了一个强大的解决方案。 了解更多 产品型号 S10 Ultra S10 Pro S10 S10 Lite 距离范围0-30m (90% 反射率);0-30m (10%反射率) 通讯接口Ethernet/IO* 防护等级IP67 查看详细规格 > 覆盖区域 计算 输入 Time of-flight camera to the object (从飞行时间摄像机到对象的距离) S10 Ultra S10 Pro S10 S10 Lite 产品优势 S 系列避障相机自带避障算法,通过结合 RGB 图像和深度图像,能更加全面地理解周围环境,实现高效的语义识别和分类,不仅可识别障碍物的位置和大小,还能理解其类型,如人或不同形状的物体等 多数据接口 支持以太网及4路I/O通讯接口 RGB-D 成像 提供深度和 RGB 多模态数据信息 自定义避障区域 支持在不同区域设置动态避障参数,包括报警和停障区域。 应用场景 户外叉车避障 割草机避障 巡检车避障 空间安全防护 规格参数 型号 S10 Ultra S10 Pro S10 S10 Lite 激光波长 940 nm 940 nm 940 nm 940 nm 输出模式 深度/RGB/IR幅度图 深度/RGB/IR幅度图 深度/RGB/IR幅度图 深度/IR幅度图 TOF分辨率和帧率 240x160@Max.10fps典型值10fps 240x160@Max.10fps典型值10fps 240x160@Max.20fps典型值15fps 240x160@Max.20fps典型值15fps TOF视野角度(HxV) 120° × 80° 61° × 90° 120° × 80° 120° × 80° RGB分辨率和帧率 1920x1080@Max.10fps典型值10fps 1920x1080@Max.10fps典型值10fps 1920x1080@Max.20fps典型值15fps - RGB视野角度(HxV) 120° × 80° 61° × 90° 120° × 90° - 距离范围 0~30m (90%反射率)0~30m (10%反射率) 0~18m (90%反射率)0~15m (10%反射率) 0.05~8m (90%反射率)0.05~8m (10%反射率) 0.05~5m (90%反射率)0.05~5m (10%反射率) 精度 ≤4 cm ≤3 cm ≤3 cm ≤3 cm 平均功耗 ≤9 W ≤7 W ≤4 W ≤4 W 尺寸 (LxWxH) 92 mm × 57 mm × 51 mm 92 mm × 47 mm × 51 mm 80 mm × 37 mm × 25 mm 80 mm × 37 mm × 25 mm 重量 <500g 460g 190g 170g 供电方式 12V~28V 24V 12V~28V 12V~28V 通讯接口 Ethernet/IO* Ethernet/GMSL/IO Ethernet/GMSL/IO Ethernet/GMSL/IO 防护等级 IP67 IP67 IP54 IP54 工作温度 -20℃~60℃ -20℃~60℃ -20℃~60℃ -20℃~60℃ 存储温度 -40℃~85℃ -40℃~85℃ -40℃~85℃ -40℃~85℃ 软件环境 C/C++/ROS SDK C/C++/ROS SDK C/C++/ROS SDK C/C++/ROS SDK 操作系统支持 Windows 7/8/10/11,Linux, Arm Linux/ROS Windows 7/8/10/11,Linux, Arm Linux/ROS Windows 7/8/10/11,Linux, Arm Linux/ROS Windows 7/8/10/11,Linux, Arm Linux/ROS 抗光干扰 100 kLux 100 kLux 100 kLux 100 kLux 应用案例 轮式人形机器人3D避障 威迈尔推出的威宝机器人采用了基于 S 系列 RGB-D 视觉传感器的智能避障方案,使得威宝机器人能够实时感知并避让低矮和周围的障碍物,从而保证了在狭小和动态变化的工业环境中安全行驶。 了解更多 轮式人形机器人3D避障 威迈尔推出的威宝机器人采用了基于 S 系列 RGB-D 视觉传感器的智能避障方案,使得威宝机器人能够实时感知并避让低矮和周围的障碍物,从而保证了在狭小和动态变化的工业环境中安全行驶。 了解更多 更多产品 V2 Pro 了解更多 M4 Pro 了解更多 H 3310 了解更多