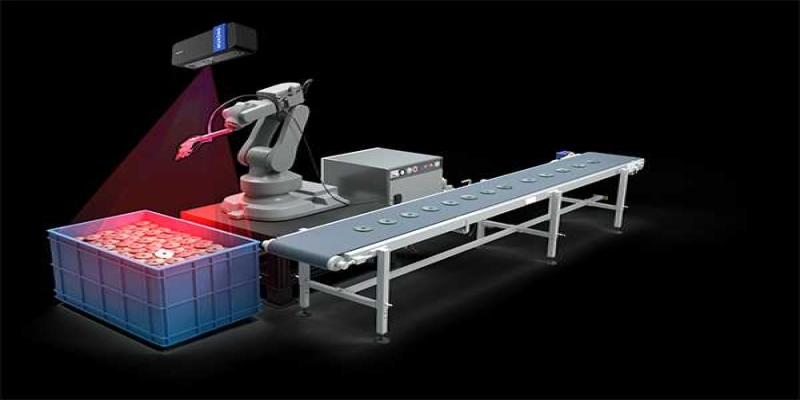
应用场景
高性能3D相机 + AI算法,赋能工业、移动机器人

客户案例
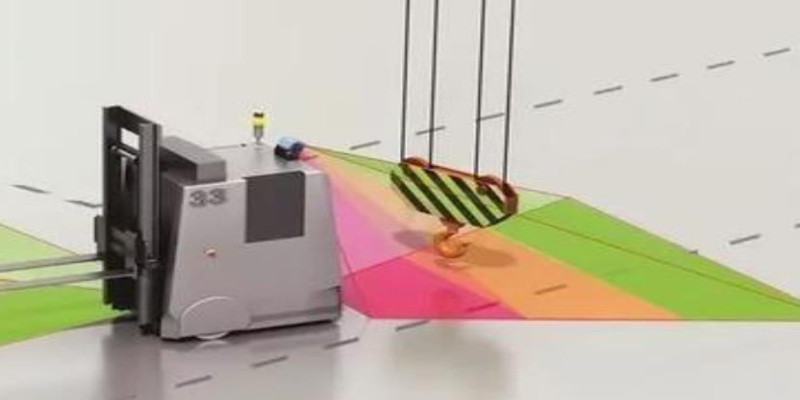
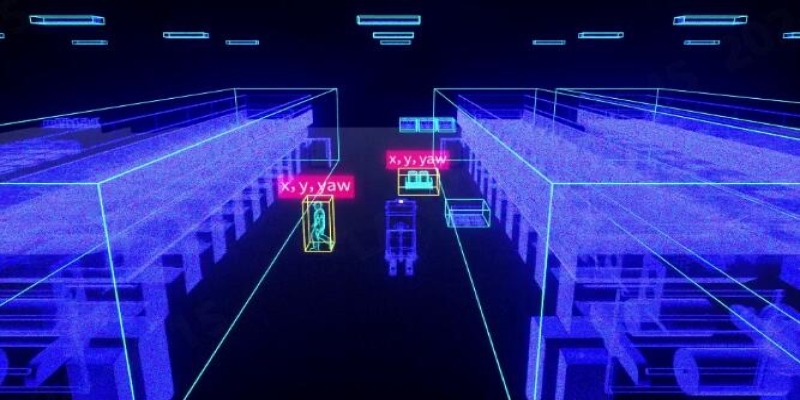
迈尔微视3D视觉感知技术,让机器人更安全、更稳定、更智能


资讯中心
引领行业的远见者

迈尔微视即将亮相泰国NEPCON Thailand 2025
诚邀您莅临NEPCON Thailand,泰国曼谷国际贸易展览中心BITEC,了解3D视觉前沿技术,以3D视觉+AI赋能现代智造,为企业降本增效...
-
2025-06-12
LET2025 落幕,回顾迈尔微视精彩内容
为期三天的LET 2025 中国(广州)国际物流装备与技术展览会于近日闭幕。作为移动机器人视觉的创新先锋,迈尔微视MRDVS在本次展会上全方位展...
-
2025-05-27
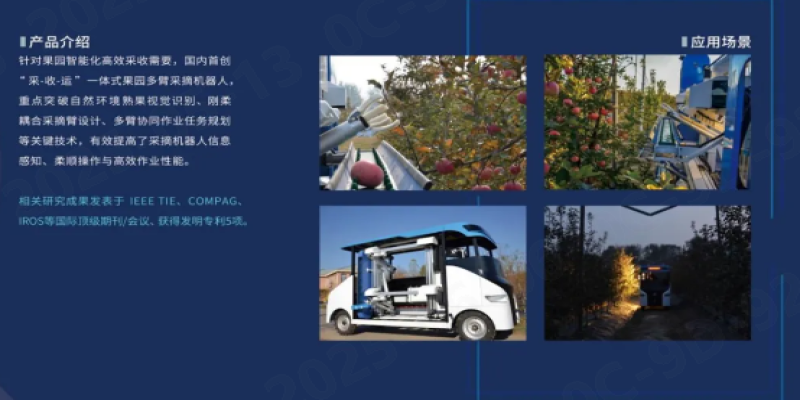
国内首创500果/小时!迈尔微视赋能农业机器人自动化采摘
迈尔微视的深度视觉解决方案已在移动机器人和仓储物流之外的多个领域实现规模化应用。在智慧农业领域,其M系列RGB-D相机应用于果实精准采摘、作物生...
-
2025-05-13
杭州机器视觉新势力:3D视觉重塑高效安全的物流仓储环境
迈尔微视自成立以来便专注于为移动机器人提供精准的视觉感知解决方案,公司核心技术涵盖了从导航、避障到物料识别、堆叠与取放等关键领域,帮助机器人在复...
-
2025-03-31
迈尔微视应邀参加AWE2025,展示dToF高精度固态激光雷达传感器S10
S10采用dToF高精度固态激光雷达技术,通过测量光脉冲的飞行时间来计算物体距离,实现高精度、高分辨率的深度感知。相较于iToF方案,dToF在...
-
2025-03-18

《齐鲁晚报 · 齐鲁壹点》专访迈尔微视总经理郑卫军:给机器人装上了“眼睛”
迈尔微视的3D视觉+AI解决方案已经集成了视觉导航、视觉避障、视觉对接和视觉抓取等技术,并且批量应用于工业搬运机器人(AGV/AMR)、无人叉车...
-
2025-03-03

迈尔微视亮相2025(第十届)物流技术大会
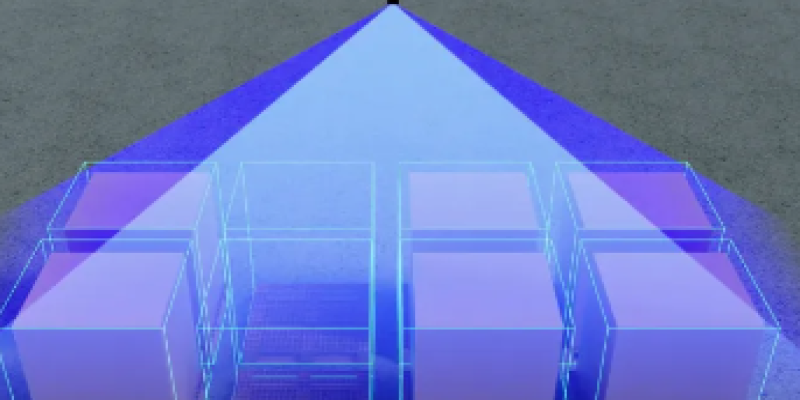
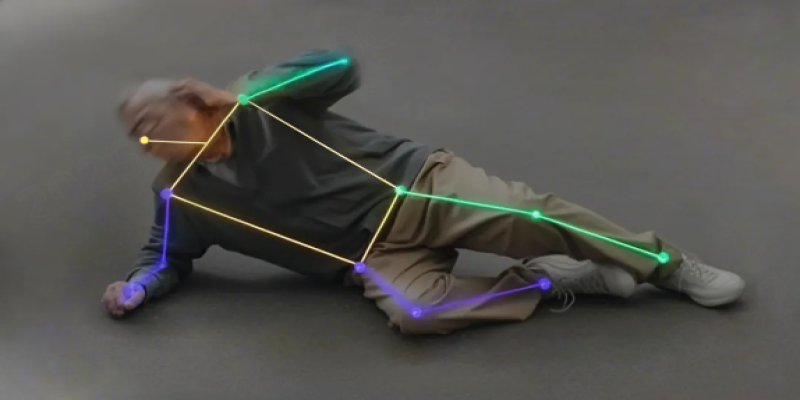
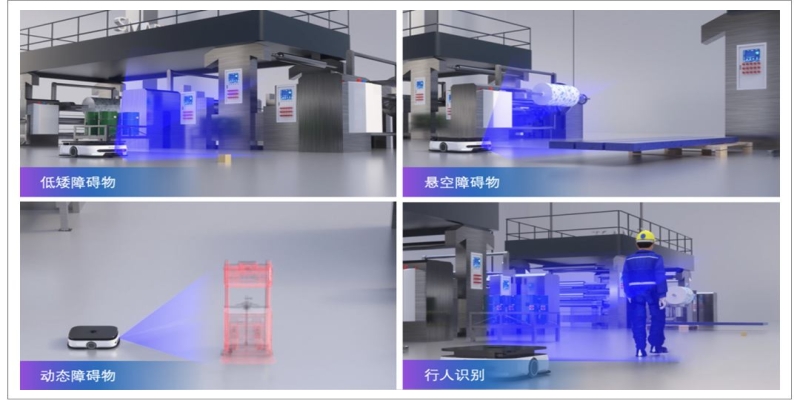
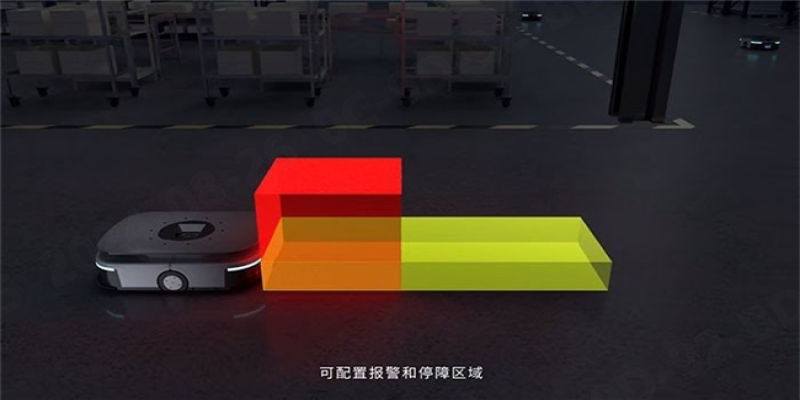
十大解决方案涵盖导航与定位、3D视觉避障、托盘识别、料筐堆垛、立库安全、库位状态识别、定位软包拆垛、人体安全防护、体积测量、人工叉车定位等多个应...
-
2025-03-03

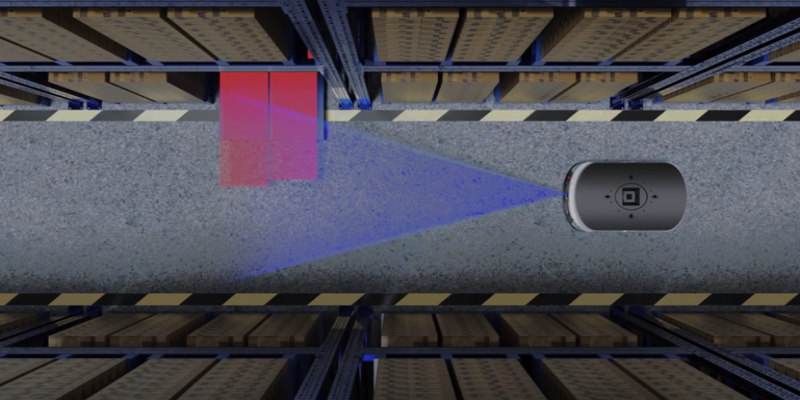
新年首发 | 利用视觉技术提升立体库安全与效率
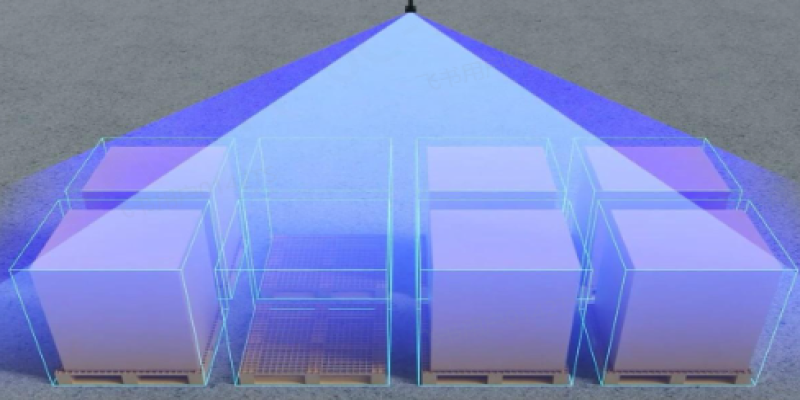
MRDVS通过深度感知能力,精准定位托盘和货架的三维空间数据,能够实时监控这些元素的位置、形状以及偏移、倾斜、变形等状态。一旦发现问题,立即反馈...
-
2025-02-06

《人民日报》:迈尔微视MRDVS让机器人更好“看懂”世界
作为移动机器人3D视觉解决方案领先提供商,迈尔微视MRDVS自公司成立以来始终围绕客户需求和应用场景打磨3D视觉感知技术,持续为移动机器人提供定...
-
2025-01-21

迈尔微视 RTLS 解决方案:重塑叉车定位与作业效率
迈尔微视专注物流仓储自动化领域多年,深度聚焦行业痛点,与多家行业领先企业建立战略合作,累计交付数万台3D视觉传感器,稳居行业前沿。基于3D视觉传...
-
2025-01-10

盘点2024:只为“看懂”世界,“看见”更智能的时代
迈尔微视(MRDVS)发布dToF深度相机S10 Pro/S10。该产品具备240x160的深度分辨率,通过实时捕获深度与纹理信息,为低速无人车...
-
2024-12-30

迈尔微视获“2023-2024双年度移动机器人行业优质供应链”奖
迈尔微视自团队成立以来,始终专注于移动机器人安全性、稳定性和智能性的提升。通过3D视觉传感器+AI算法,赋予机器人更强大的三维环境感知能力,是移...
-
2024-12-24

迈尔微视出席“机器视觉+AI”主题研讨会
“机器视觉+AI打造新质生产力赋能工业智造”主题研讨会在杭州召开,作为行业领先的移动机器人3D视觉解决方案提供商,迈尔微视应邀出席会议。
-
2024-12-24
迈尔微视正式发布3D视觉传感器S10 Pro/S10,助力移动机器人从室内走向室外
作为行业移动机器人3D视觉解决方案提供商,迈尔微视MRDVS在感知范围上实现了从近到远,从室内到室外的全覆盖产品布局,发布最新创新产品,基于先进...
-
2024-12-13

迈尔微视MRDVS室外3D视觉避障传感器S10 Pro/S10
迈尔微视MRDVS市场总监王立平将在会上隆重发布室外3D视觉避障传感器新产品——S10 Pro和S10,并分享主题演讲《3D视觉助力移动机器人从...
-
2024-12-10


迈尔微视3D视觉赋能移动机器人,看无人叉车如何每日安全稳定执行超500条任务
随着工业4.0和智能制造的浪潮,F公司在其数字化智能工厂通过大规模的自动化设备应用实现了生产与物流效率的大幅提升。无人堆高车在其中承担了关键的内...
-
2024-11-26



3D视觉技术在移动机器人领域的应用白皮书
随着科技的不断进步,3D视觉技术在移动机器人领域的应用日益广泛,为机器人的智能化和自主化提供了强有力的技术支持。白皮书将深入探讨3D视觉技术的基...
-
2024-11-14

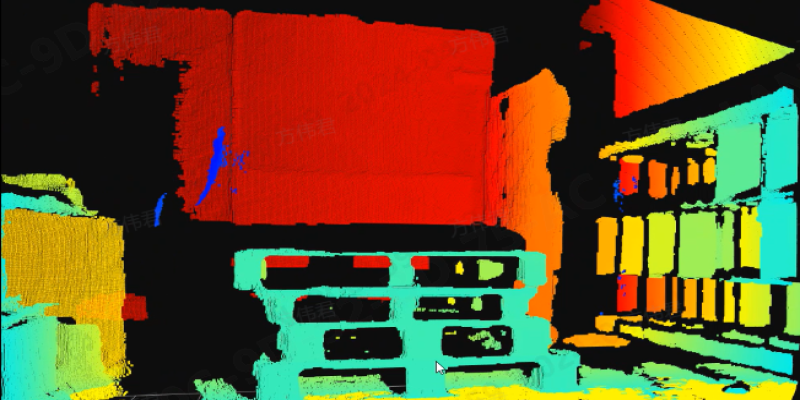
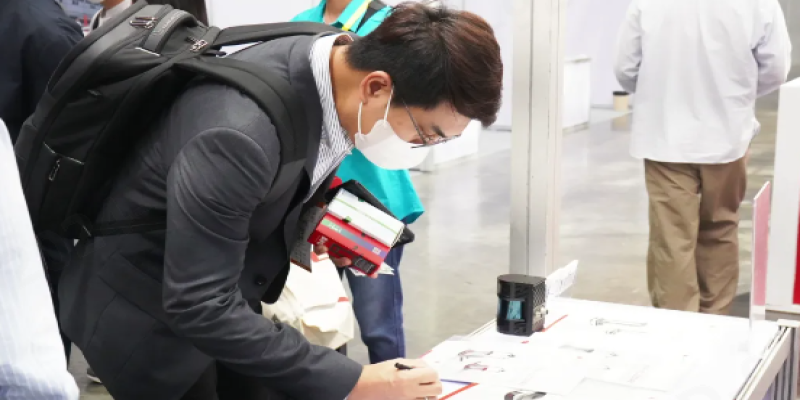
CeMAT开展首日,迈尔微视备受关注
迈尔微视专注于为移动机器人提供软硬件一体的视觉解决方案,通过3D视觉+AI算法让移动机器人更安全、更稳定、更智能。团队成立至今已累计交付超万台移...
-
2024-11-11
诚邀莅临上海CeMAT展,体验3D视觉赋能多场景智能化应用
作为智能视觉技术的引领者,迈尔微视将在展会上展示其最新3D视觉解决方案,赋能智能设备在仓储、物流及工业自动化领域的广泛应用。
-
2024-10-25
迈尔微视亮相泰国物流展LogiMAT
10月16-18日,迈尔微视MRDVS亮相泰国物流展LogiMAT Southeast Asia 2024。LogiMAT Southeast ...
-
2024-10-24

杭州「余杭活动周」圆满落幕,迈尔微视产品备受关注
迈尔微视携S(视觉避障)、M(视觉对接)、V(视觉导航)、H(视觉抓取)四大系列产品参加了“余杭区科技成果展”。其中,S系列专为满足移动机器人应...
-
2024-10-24
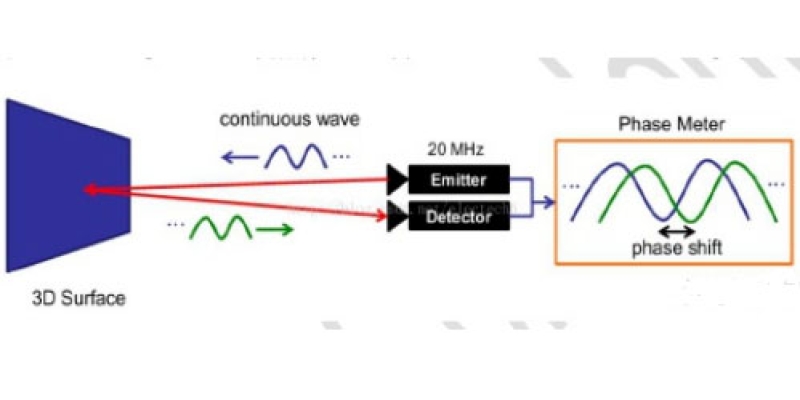
了解3D ToF技术:从原理到应用
引言飞行时间(Time-of-Flight,简称ToF)技术是一种先进的三维成像技术,其工作机制与三维激光扫描技术有着相似之处。ToF技术的主要...
-
2024-10-23

【专访】迈尔微视总经理郑卫军谈3D视觉赋能人形机器人
为深入了解威宝人形机器人背后的3D视觉方案,以及多传感器方案如何实现威宝的全流程智能化的问题,518智能装备在线记者特别采访了迈尔微视总经理郑卫...
-
2024-10-21
提升AGV搬运效率,这家企业又出“新招”
随着仓储自动化需求的不断提升,移动机器人(AGV/AMR)在现代仓库中扮演着越来越重要的角色。移动机器人的高效运作依赖于仓库内库位状态的实时更新...
-
2024-10-21

3D视觉系统 定位识别系统机械手视觉抓取引导
3D视觉系统,这一现代科技的杰作,正在逐步改变我们对世界的认知和操作方式。作为一种高精度、高速度的信息获取工具,它在许多领域,如自动化生产线、智...
-
2024-10-16

AGV视觉避障的主要导引和应用范围
AGV,即自动导引小车,是美国供应链管理专业协会所定义的一种智能化运输工具。它装配了电磁或光学等自动导引装置,能够在预设的导航路径上自由驰骋,不...
-
2024-10-16
迈尔微视:AGV导航避障机器人 解决仓储难题
迈尔微视的AGV导航避障机器人,以其卓越的技术和高效的性能,正成为解决仓储难题的一大利器。在仓储物流领域,随着货物量的不断增加和仓库规模的扩大,...
-
2024-10-16

3D视觉系统拆垛结构光相机机械臂引导抓取工件上下料工业应用
在现代化工业生产线中,3D视觉系统拆垛结构光相机与机械臂的协同工作已经变得越来越普遍。这一先进技术的应用,不仅提升了生产效率和产品质量,更在很大...
-
2024-10-16

3D视觉传感器结构光双目相机机械臂引导抓取应用
3D视觉传感器在结构光双目相机与机械臂引导抓取应用中,展现出了令人瞩目的潜力和实用性。这一技术融合了先进的计算机视觉、传感器技术和精密的机械臂控...
-
2024-10-16

TOF相机RGBD视觉传感器移运机器人避障对接应用
TOF相机RGBD视觉传感器移运机器人避障对接应用在现代工业领域中,已经得到了广泛的应用。这种技术通过TOF(Time of Flight)相机...
-
2024-10-16



3D视觉导航新品上市 迈尔微视MRDVS移动机器人
迈尔微视MRDVS移动机器人——视觉导航V系列,全新上市,引领移动机器人导航进入全新纪元。这款由浙江迈尔微视科技有限公司精心研发的深度相机,专为...
-
2024-10-16

AGV避障导航 移动机器人视觉避障的产品优势和产品品质
浙江迈尔微视科技有限公司精心打造的工业RGB-D相机,专为移动机器人的避障应用而生。它如同机器人的智慧之眼,敏锐捕捉前方的障碍物距离与纹理信息,...
-
2024-10-16

迈尔微视:为人形机器人视觉感知提供精准解决方案
迈尔微视MRDVS(Mobile Robot Depth Vision System)作为国内首家专注于移动机器人和人形机器人视觉感知技术的公司...
-
2024-10-16

扬帆出海!迈尔微视亮相美国MODEX 2024
3月11日,备受瞩目的美国国际物流搬运和物流展MODEX 2024在亚特兰大盛大开幕。移动机器人3D视觉专家迈尔微视MRDVS携全系产品亮相,向...
-
2024-10-16

即将出发!迈尔微视将亮相美国MODEX 2024
2024年3月11-14日,移动机器人3D视觉专家迈尔微视MRDVS将亮相美国MODEX 2024展会,向全球市场展示其尖端的3D视觉技术与移动...
-
2024-10-16

迈尔微视MRDVS出席2023年浙江省物流工程学术研讨会
11月17~18日,2023年浙江省物流工程学术研讨会在杭州召开。大会由浙江省机械工程学会物流工程分会、浙江工业大学主办,以“物流装备与技术创新...
-
2024-10-16
从“看得见”到“看得懂”,人形机器人需要怎样的视觉传感器?
11月2日,工信部印发《人形机器人创新发展指导意见》(以下简称《意见》),提出人形机器人有望成为继计算机、智能手机、新能源汽车后的颠覆性产品,深...
-
2024-10-16
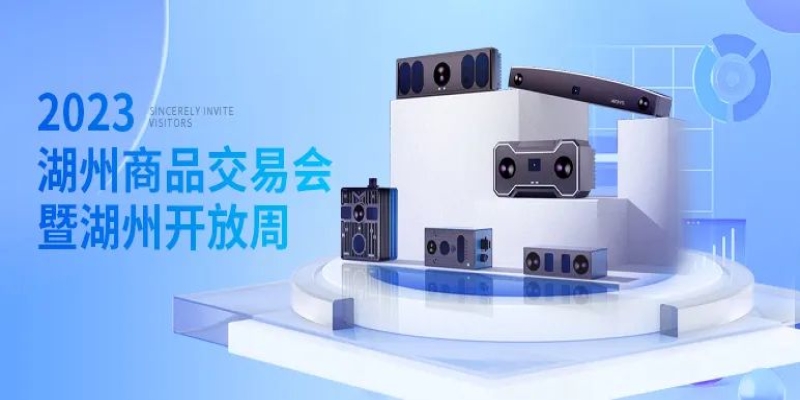
强 “视”进击开放周,迈尔微视赋能物流装备
2023湖州商品交易会暨湖州开放周将于11月16~18日在浙江省湖州市龙之梦会议中心举办,迈尔微视将携专为智能物流打造的3D视觉传感器和解决方案...
-
2024-10-16

精彩回放 | 迈尔微视MRDVS总经理:3D感知,移动机器人的眼睛
10月24日,由移动机器人(AGV/AMR)产业联盟、CeMAT ASIA 2023亚洲国际物流展联合主办,新战略移动机器人全媒体、《物流搬运机...
-
2024-10-16

Vision China专访 | 前瞻布局AI,打造移动机器人3D视觉独特优势
受访人:浙江迈尔微视科技有限公司 总经理 郑卫军 Q:VisionChina(深圳)2023展览会,贵公司带来哪些产品、技术和解决方案?请介绍一...
-
2024-10-16

迈尔微视MRDVS亮相Vision China深圳展,加速推进3D视觉技术应用
10月30日,Vision China 2023深圳机器视觉展在深圳国际会展中心火热开幕。迈尔微视MRDVS携3D视觉全线产品亮相,凭借3D视觉...
-
2024-10-16

Vision China 深圳 丨“视”不可挡!迈尔微视MRDVS邀您共赴多模态3D视觉新视界
10月30日-11月1日, 2023中国(深圳)机器视觉展将在深圳国际会展中心(宝安新馆)举办。迈尔微视MRDVS将携新发布的多模态3D视觉产品...
-
2024-10-16
新品发布 | 迈尔微视MRDVS发布多模态避障相机S2
S2是迈尔微视MRDVS专为移动机器人避障应用研发的工业级多模态相机。通过获取前方障碍物距离及纹理信息,结合AI算法对障碍物进行识别分类,提升移...
-
2024-10-16

迈尔微视MRDVS亮相CeMAT,3D视觉技术引关注
10月24日,亚洲国际物流技术与运输系统展览会CeMAT ASIA 2023,在上海新国际博览中心开幕。本次展会,迈尔微视3D视觉传感器产品系数...
-
2024-10-16

CeMAT 2023 | 迈尔微视MRDVS解锁移动机器人3D“新视界”
亚洲国际物流技术与运输系统展览会CeMAT ASIA 2023将于10月24日开幕。迈尔微视MRDVS将携移动机器人3D视觉解决方案首度亮相Ce...
-
2024-10-16

2023工博会 | 迈尔微视MRDVS以3D视觉之眼洞见移动机器人未来
9月19-23日,备受全球瞩目的中国国际工业博览会(工博会)火热召开。本届工博会汇聚70余家世界500强企业、数百家专精特新“小巨人”企业,堪称...
-
2024-10-16

迈尔微视(MRDVS)精彩亮相TILOG-LOGISTIX 2023
8月17日,泰国曼谷物流设备仓储及运输展览会TILOG-LOGISTIX 2023开幕,迈尔微视(MRDVS)亮相首日产品备受关注。
-
2024-10-16

3D视觉方案赋能人形机器人:精准抓取、智能导航与安全避障
S系列视觉避障传感器结合语义识别算法,让机器人能够识别障碍物的类别和属性,并根据实际情况智能选择绕行或停障策略,有效规避风险,避免碰撞事故。
-
2024-10-15

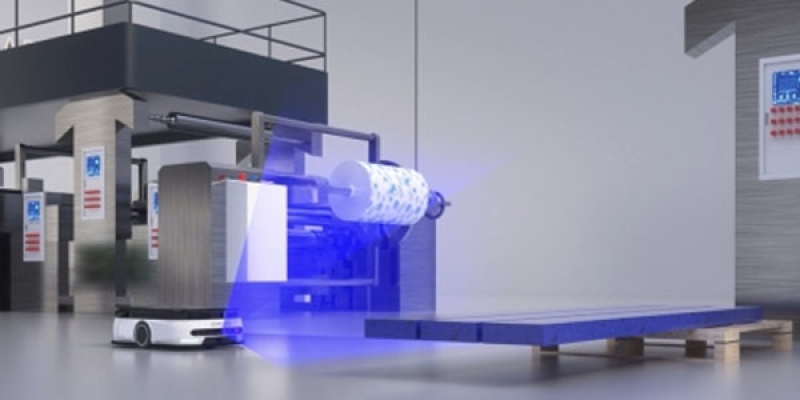
AGV邂逅3D视觉,迈尔微视重塑物料搬运高效未来
在当下快节奏的工业大环境里,效率和精准度可谓是仓储、制造以及物流操作取得成功的关键要素。物料搬运,也就是贯穿整个供应链的物品移动、存储、保护和控...
-
2024-10-15

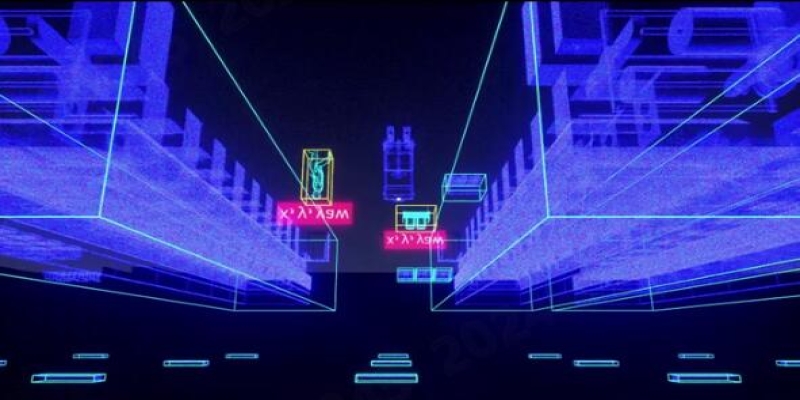
迈尔微视托盘识别对接解决方案
在智能物流与仓储管理领域,托盘识别作为核心技术之一,对提高自动化叉车的效率和准确性至关重要。传统的2D视觉和激光雷达技术在处理复杂的仓储环境时,...
-
2024-10-15

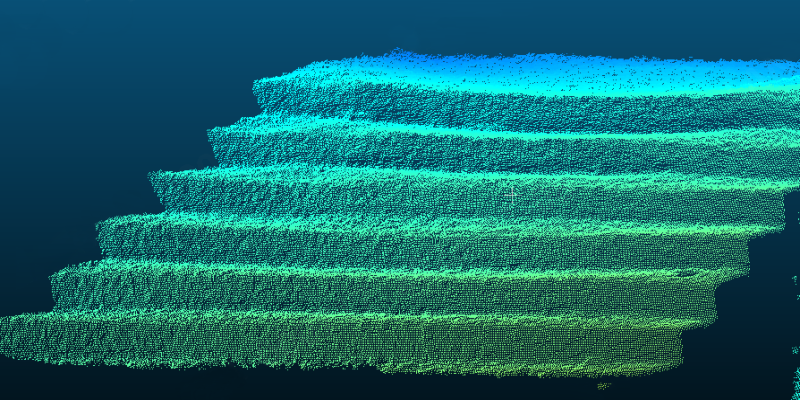
软包拆垛:物流与生产领域的智能化变革
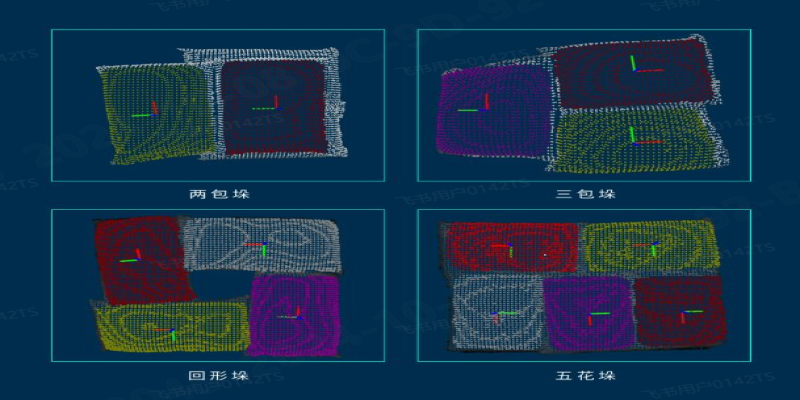
软包拆垛主要依赖于先进的机器视觉技术,其中3D视觉技术发挥着核心作用。通过3D相机对物体进行扫描,能够获取物体的三维点云数据,这些数据包含了物体...
-
2024-10-15


索尼IMX570怎么样?提供无与伦比的图像质量和深度信息
索尼 IMX570巩固了其作为领先iToF传感器的地位,其凭借其尖端的BSI技术、紧凑的5微米像素设计、高分辨率深度传感、高帧率、在各种照明条件...
-
2024-09-27

迈尔微视(MRDVS)荣登人形机器人感知与控制供应链“上榜企业”
9月12日,2024中国国际光电博览会-首届具身智能人形机器人控制与传感技术创新峰会在深圳国际会展中心召开。迈尔微视(MRDVS)被授予“人形机...
-
2024-09-13

迈尔微视(MRDVS)亮相日本东京,闪耀LTT EXPO 2024
9月10日,2024年国际物流综合展(LTT EXPO 2024)在东京国际展览中心(Tokyo Big Sight)开幕,迈尔微视(MRDVS...
-
2024-09-13

迈尔微视(MRDVS)将出席「首届具身智能人形机器人控制与传感技术创新峰会」
本次峰会以“感触万物 · 具身进化”为主题,旨在推动人形机器人领域的技术革新与应用拓展。迈尔微视(MRDVS)总经理郑卫军将发表主题演讲《具身智...
-
2024-09-06
迈尔微视MRDVS正式发布移动机器人避障相机S3
8月24日上午,移动机器人3D视觉专家迈尔微视MRDVS于2024世界机器人大会发布机器人避障相机S3,深受专业观众欢迎。基于该产品,迈尔微视将...
-
2024-08-26

迈尔微视正式发布导航相机T2,为移动机器人感知赋能
8月22日,移动机器人3D视觉技术领航者迈尔微视(MRDVS) 在2024世界机器人大会期间正式发布最新力作一一机器人 导航相机T2。
-
2024-08-26

迈尔微视3D视觉新品发布暨具身智能感知应用论坛
T2是一款全新RGB-D相机,专为满足机器人时代对三维环境感知的需求而设计。T2具有270°x70°超宽视场角、高分辨率和远距离感知能力,可实时...
-
2024-08-17

TOF相机移动机器人 3D视觉定位避障导航怎么用
3D视觉定位避障导航是一项令人惊叹的技术,它通过获取物体的三维信息来实现对环境的感知和决策。在使用3D视觉定位避障导航时,我们首先需要一个3D视...
-
2024-07-10

迈尔微视3D视觉传感器价格 结构光视觉传感器
背景:汽车引擎盖在组装时时需要进行涂胶,人工涂胶误差大。难点:传统2D视觉定位精度差解决方案:通过悟空3D传感器采集三维图像信息,利用3D智能软...
-
2024-07-10

迈尔微视3D视觉导航传感器规格 3D视觉系统混合拆垛
3D相机融合3D机器视觉和深度学习算法,赋予机器人真实环境的“感知能力”和“手眼协同能力”,使他们能够通过思考来执行任务,解决了工业机器人分拣领...
-
2024-07-10

迈尔微视:TOF相机定制 RGBD相机的性能和价格
迈尔微视是一家专注于高精度三维视觉技术的公司,致力于为客户提供最优质的TOF相机和RGBD相机解决方案。在相机定制方面,迈尔微视拥有多年的经验和...
-
2024-07-10

迈尔微视的3D视觉系统定位识别系统 机器人3D定位系统怎么样?
迈尔微视的3D视觉系统定位识别系统无疑是当前机器人技术领域的佼佼者。该系统采用了最先进的深度学习和计算机视觉算法,赋予了机器人卓越的空间感知和定...
-
2024-07-10

3D视觉相机的结构及工作原理 (手机和相机原理区别)
随着3D电影的发展手机和相机原理区别,3D逐渐成为我们生活中最有趣的技术。大家都听说过3D电影,那么你听说过3D相机吗?随着科技的进步,3D技术...
-
2024-07-02

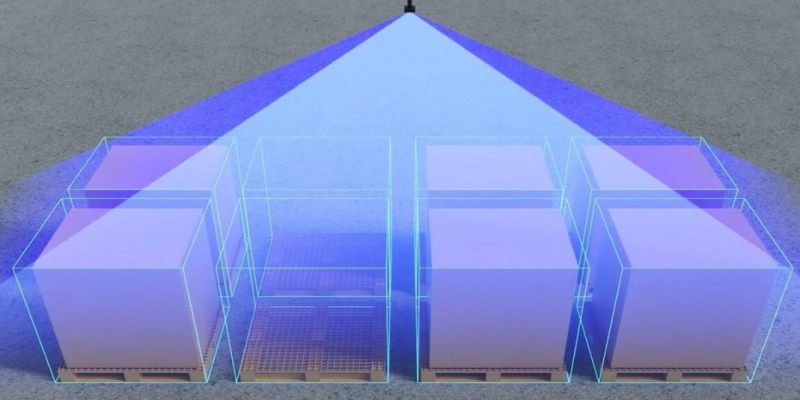
迈尔微视3D视觉体积测量:精准与高效兼具
迈尔微视3D视觉体积测量方案可以实现对单个物体或多目标物体的体积测量,提供快速、准确、直观的物体体积数据,极大地优化从工业生产到物流配送的各个环...
-
2024-05-31

LET2024开幕,迈尔微视MRDVS亮相广州物流展
5月29日,中国(广州)国际物流装备与技术展览会(LET 2024)在广州·广交会展馆D区盛大开幕。移动机器人3D视觉专家——迈尔微视MRDVS...
-
2024-05-30

迈尔微视MRDVS即将亮相LET 2024广州物流展
2024中国(广州)国际物流装备与技术展览会(简称LET 2024)将于5月29日至31日在广州广交会展馆盛大开幕,迈尔微视携手帧传科技亮相本届...
-
2024-05-23

会议预告 | 迈尔微视MRDVS将出席第十三届制造业物流与仓储智能化工程大会
第十三届制造业物流与仓储智能化工程大会暨第二届全球叉式移动机器人峰会将于5月9日在广东佛山召开。叉式移动机器人产业链上下游企业将齐聚大会
-
2024-05-08
迈尔微视: TOF相机的介绍 分类 基本原理和优缺点
ToF相机不同于使用2D图像来推算3D资讯,ToF是透过红外光在空气中的飞行时间,计算出目标体的距离。ToF技术也是机器视觉工业的重要里程碑,因...
-
2024-05-08

3D视觉相机在AGV/AMR的应用 AGV避障导航等
叉式移动机器人(AGV/AMR)是在叉车上加载各种导引技术,构建地图算法,辅以避障安全技术,实现叉车的无人化作业。随着行业对自动化搬运的要求越来...
-
2024-05-08

多径干扰:ToF相机面临的最大挑战与解决之道
多径干扰是Time-of-Flight(ToF)相机在应用中面临的最大挑战之一。这种干扰是由于光线在传播过程中遇到不同的物体表面后反射、折射或散...
-
2024-05-08

TOF相机是什么 TOF相机的主要应用领域有哪些
TOF相机,即Time of Flight相机,是一种先进的深度成像技术。通过向目标物体发射光脉冲并测量其往返时间,TOF相机能够精确地计算出物...
-
2024-05-08
深度探讨3D视觉技术和3D传感器 3D视觉定位相机
1.3D视觉技术2D视觉技术借助强大的计算机视觉和深度学习算法取得了超越人类认知的成就,而3D视觉则因为算法建模和环境依赖等问题,一直处于正在研...
-
2024-05-08

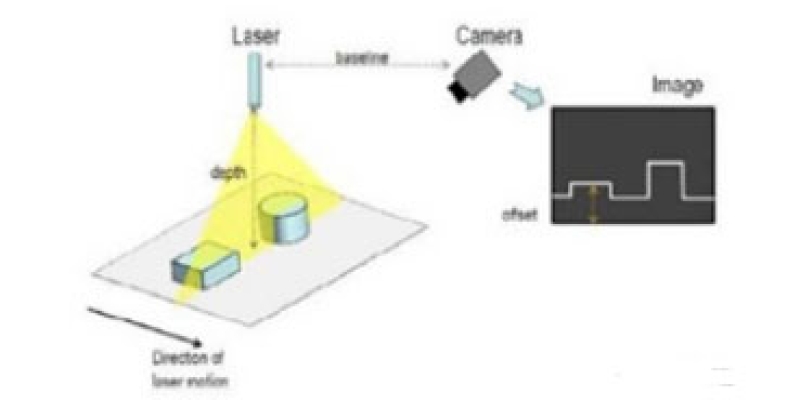
3D视觉相机的工作原理和技术参数
传统工业机器视觉中,2D指的是X方向加Y方向,那么3D视觉自然就是加了一个Z方向。目前我接触到的公司产品是3D激光轮廓仪,也叫3D激光传感器,线...
-
2024-05-08

什么是3D视觉 3D视觉系统技术的实现原理
3D视觉,如同人类双眼的魔法,让我们得以洞察物体的深度与立体感。它模拟了人类视觉系统的工作原理,通过捕捉两个不同视角间的微妙差异,揭示出物体...
-
2024-05-08

3D视觉最有前景的场景:机器人引导 高精度测量 缺陷识别
3D视觉技术以其卓越的检测精度和强大的环境适应性,远超2D视觉技术,成为当今工业自动化的新宠。2D视觉技术,虽然已有三十余年的工业应用历史,但其...
-
2024-05-08

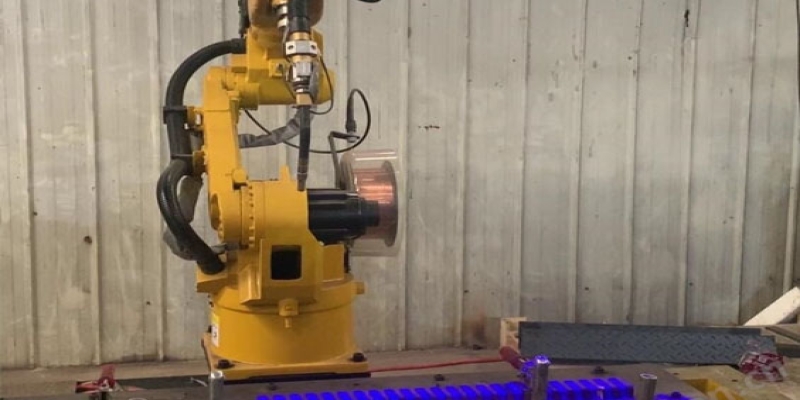
3D视觉在重工焊接领域的智能化应用场景
近年来,重工、焊接视觉技术备受市场关注,焊接视觉销量激增。但对工件种类繁多、工件轮廓圆弧曲线多等应用场景,客户很难通过专机、机器人示教、固定工装...
-
2024-05-08

机器人3D视觉系统引导曲轴工件自动化上料的解决方案和优势
在制造业中,曲轴是一种重要的机械零件,广泛应用于汽车、船舶、发电机组等领域。随着科技的发展,曲轴制造的自动化水平不断提高,其中3D视觉引导技术为...
-
2024-05-08

迈尔微视:3D视觉系统引导金属曲轴上料的全过程
这绝非你锤炼肌肉的哑铃,而是一块沉甸甸的金属曲轴,它是汽车心脏——发动机不可或缺的核心部件。今天,我们要探讨的议题便是关于这金属曲轴的上料过程。...
-
2024-05-08
高精度3D视觉定位结构光相机 迈尔微视TOF相机介绍
WuKong (悟空)系列3D视觉传感器是迈尔微视研发的基于多帧结构光技术的高精度3D视觉定位结构光相机,主要用于机器人的“手"对工作...
-
2024-05-08

高精度智能3D视觉相机引导抓取设备的检测原理
3D视觉引导抓取设备是迈尔微视研发的基于多帧结构光技术的高精度智能3D相机,主要用于机器人的“手"对工作对象的抓取等操作的视觉感知。可...
-
2024-05-08

迈尔微视:结构光高精度3D视觉相机的性能怎么样
3D视觉传感器是迈尔微视研发的基于多帧结构光技术的结构光高精度3D相机,主要用于机器人的“手"对工作对象的抓取等操作的视觉感知。可提供...
-
2024-05-08
Eagle-M4 PRO移动机器人专用3D视觉导航传感器怎么样
EAGLE-M4 PRO搭载蓝芯核心技术LX-MRDVS,为工业移动机器人提供视觉定位/视觉避障/视觉对接软硬件一体解决方案,让机器人适应更多复...
-
2024-05-08

细说V1移动机器人AGV导航避障深度相机
移动机器人导航和避障深度相机融合了1280×1024像素的3D相机模组,可提供1-12m广阔的测量范围。其轻巧便携的设计仅重684g,方便灵活部...
-
2024-05-08

3D视觉系统技术方案详解,多场景应用或将引爆市场
近年来,随着芯片技术的发展以及相关软硬件系统的深入,视觉传感器得到了极为广泛的应用。社会越来越智能,可以使用人工智能和大数据技术将人们记录下来的...
-
2024-05-08
迈尔微视:移动机器人3D视觉避障相机产品介绍
移动机器人3D视觉避障相机是现今行业内体积最小的工业RGB-D相机。产品提供完整的深度数据接口,广泛适用于各种工业场景。搭配AI算法,可实现托盘...
-
2024-05-08

在3C锂电工厂 迈尔微视AGV避障导航搬运机器人的工作场景
锂电池,如同能量的魔法师,悄悄地为我们的世界注入活力。它们分为消费型、动力型和储能型,其中消费型锂电池,被亲切地称为“3C锂电”,是手机、笔记本...
-
2024-05-08

3D视觉导航+AI算法 迈尔微视智能托盘对接方案
在智能物流系统中,无人叉车(AGV叉车)不仅需要处理基本的导航问题,例如自主定位、规划安全路径、导航至目标点等,更需要实现托盘识别和定位、料笼堆...
-
2024-05-08
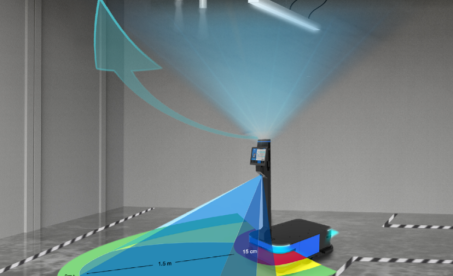
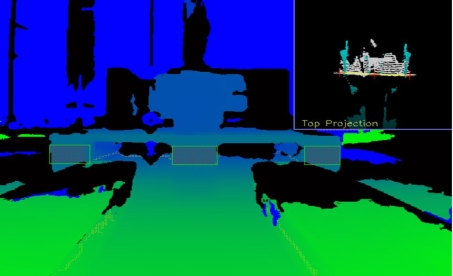
3D视觉感知+AI决策 迈尔微视助力移动机器人安全再提升
避障,作为移动机器人在复杂工业环境中安全运行的守护神,其重要性不言而喻。这一功能犹如机器人的双眼和大脑,需要协同完成障碍物的探测与决策。想象一下...
-
2024-05-08

迈尔微视新产品:多模态AGV避障导航相机S2介绍
S2是迈尔微视MRDVS专为移动机器人避障应用研发的工业级多模态相机。通过获取前方障碍物距离及纹理信息,结合AI算法对障碍物进行识别分类,提升移...
-
2024-05-08

迈尔微视3D视觉分拣系统--赋予机器人真实环境的“感知能力”
随着人口红利的逐渐消失,越来越多的行业开始尝试落地“机器换人”的理念。虽然工业机器人在汽车领域已有广泛应用,但在更新迭代速度极快的3C电子产业和...
-
2024-05-08

3D视觉定位系统方案 操作简单 高效稳定
专业针对散乱无序堆放的工件设计,可协助机器人实现3D智能抓取。通过对工件3D数据扫描以实现三维准确定位,引导机械手准确抓取定位工件,实现了工业机...
-
2024-05-07

3C光伏锂电行业 AGV避障导航车 智能搬运机器人的性能和价格
AGV避障导航车,作为一种智能搬运机器人,近年来在物流、仓储、制造等领域得到了广泛应用。这种机器人采用先进的避障导航技术,能够在繁忙的工作环境中...
-
2024-05-07

AGV避障导航小车在3C光伏锂电行业的应用
AMR顶升式无轨搬运机器人和AGV导航小车在3C光伏锂电行业的应用,正日益展现出其独特的价值和潜力。这些先进的物流设备不仅提高了生产效率,降低了...
-
2024-05-07

3C行业辊筒式搬运机器人AMR托盘叉车无轨导航光伏锂电应用
在3C行业,辊筒式搬运机器人AMR(Automated Guided Vehicle with Forklift Functionality)正...
-
2024-05-07

顶升AGV智能搬运机器人3C电子包装印刷新能源光伏行业应用
顶升AGV智能搬运机器人在3C电子、包装印刷、新能源光伏等行业的应用日益广泛,成为现代工业生产中不可或缺的重要设备。在3C电子领域,顶升AGV智...
-
2024-05-07

无人叉车AGV避障导航3C新能源光伏锂电包装印刷应用
无人叉车AGV自然导航技术在3C新能源、光伏、锂电、包装印刷等领域的应用日益广泛,成为现代工业自动化发展的重要推动力。这一技术的引入不仅提升了生...
-
2024-05-07

TOF相机RGBD视觉传感器移运机器人避障对接应用
TOF相机RGBD视觉传感器在移运机器人避障对接应用中发挥着至关重要的作用。这种先进的视觉传感器技术为机器人提供了卓越的深度感知能力,使其能够在...
-
2024-05-07

3D相机移动机器人视觉避障定位托盘对接三维系统
在科技飞速发展的今天,我们迎来了一个激动人心的时刻——3D相机移动机器人视觉避障定位托盘对接三维系统的诞生。这一系统融合了机器人技术、机器视觉、...
-
2024-05-07

3D视觉定位:托盘定位系统的重要性
托盘定位系统在物流、仓储和运输等领域中扮演着至关重要的角色。它不仅仅是一个简单的设备或工具,更是现代物流体系中不可或缺的核心组成部分。托盘定位系...
-
2024-05-07

简要分析室外型AGV避障与室内AGV导航的异同
室外型AGV与室内AGV在设计、功能和应用场景等方面存在显著的不同。首先,从外观设计上,室外型AGV更注重耐用性和稳定性。由于室外环境多变,如高...
-
2024-05-07
如何计算AGV一小时能搬运几托货物
要精确衡量AGV(自动导引车)在一小时内能搬运多少托货物,必须全面考量诸多关键因素。AGV的搬运效率无疑是核心,而这深受其设计、尺寸、载重能力以...
-
2024-05-07

工厂AGV避障导航系统的安全移动速度
AGV(自动导引车)在工厂中的安全移动速度,宛若舞者轻盈的步伐,既展现出技术的精湛,又确保了生产的高效与安全。这一舞步的节奏,受到多种因素的精妙...
-
2024-05-07

一分钟带你了解AGV避障导航系统的基本构成
AGV系统,即自动导引车系统,是现代物流领域的璀璨明珠,发挥着举足轻重的作用。它由AGV单车、控制系统和充电系统三大支柱构成,每个部分都独具特色...
-
2024-05-07

带你了解室外AGV避障用什么导航方式
在探索室外AGV的导航方式时,我们发现了犹如星辰般璀璨的多种选择:激光导航、磁导航、视觉导航和惯性导航。这些导航方式,每一种都如同独特的星辰,有...
-
2024-05-07

快速带你了解AGV避障导航机器人的驱动方式
AGV的驱动方式是实现其自主导航和移动的核心机制,每种方式都独具魅力,适用于不同的场景。想象一下,单轮驱动就像AGV在舞台上独舞,它仅需一个轮子...
-
2024-05-07

车间AGV避障导航小车效率比人工快多少
在理想的运作条件下,AGV小车的速度犹如矫健的猎豹,疾驰在工厂的地板上,速度高达每分钟90米。这种速度堪比熟练的工人,甚至在某些场景中更胜一筹。...
-
2024-05-07
国内AGV避障导航技术怎么样 AGV的发展现状
近年来,国内AGV技术犹如一匹奔腾的骏马,飞跃发展,成果丰硕。其技术水平的突飞猛进,无疑为国内制造业注入了强大的活力。在导航、定位、控制、调度等...
-
2024-05-07

从平库到立库:AGV避障导航驱动下的仓储转型升级
在现代物流仓储领域,随着自动化、智能化技术的不断发展和应用,仓储模式正在发生深刻变革。传统的平面仓库(平库)虽然简单易用,但在空间利用率、作业...
-
2024-05-07

迈尔微视:AGV机器人一般是如何避障的
AGV(自动导引车)的避障功能主要依赖于传感器感知与数据采集技术。为了实现这一功能,AGV装备了多种传感器,如激光传感器、视觉传感器和超声波传感...
-
2024-05-07

3D视觉系统 3D视觉相机的工作原理
3d视觉相机工作原理3D视觉相机的工作原理主要基于光学和计算机视觉的技术。它的核心在于通过捕捉物体的立体图像,进而生成物体的三维模型。首先,3...
-
2024-05-07
3D机器视觉初步认识:3D相机介绍
在工业中,3D相机是一种非常重要的传感器,它通过测量目标的物理尺寸和形状来获取关于目标的数据。这种3D相机的工作原理主要基于机器视觉和计算机视觉...
-
2024-05-07

机器人3D视觉系统定位识别系统的工作流程
3D视觉定位系统,如同机器人的“明眸”与“智慧之源”,依据预构建的3D模型与相关信息,精确捕捉相机在拍摄时的位置与姿态。这一关键技术,在人员定位...
-
2024-05-07

无人叉车工厂车间AGV避障导航智能搬运机器人托盘搬运的应用
在繁忙的无人叉车工厂车间,智能搬运机器人正忙碌地穿梭于货架与生产线之间。这些机器人拥有先进的托盘搬运技术,能够准确、高效地搬运各种货物。它们不仅...
-
2024-05-07

迈尔微视: 3D视觉系统定位识别技术详解
近年来,随着芯片技术的发展以及相关软硬件系统的深入,视觉传感器得到了极为广泛的应用。社会越来越智能,可以使用人工智能和大数据技术将人们记录下来的...
-
2024-05-07
牵引式导航AGV与潜伏式避障AGV的区别和优缺点
牵引式AGV与潜伏式AGV,两者各具特色,分别在各自的舞台上大放异彩。牵引式AGV,以其简约而不简单的构造和卓越的性能,成为物流运输领域的佼佼者...
-
2024-05-07
迈尔微视:AGV视觉导航标示线检测研究
在自动化导航的世界里,车道标示线不仅是道路的边界,更是智能引导车(AGV)识别路径的明灯。AGV,作为一种视觉导航的智能载具,它依赖CCD摄像机...
-
2024-04-26

移动机器人AGV避障的主要导引和导航方式
移动机器人的导航问题主要涉及三个问题:“现在在何处?”,“要往何处去?”,“要如何去?”。其中第一个问题是导航系统中的定位问题,确定移动机器人在...
-
2024-04-26

3D视觉工业机器人 3D视觉定位引导机械臂抓取结构光相机
3D视觉工业机器人在现代制造业中发挥着越来越重要的作用。这些机器人利用先进的视觉定位技术,通过精确的机械臂抓取操作,实现了高效、准确的物料搬运和...
-
2024-04-25

3D视觉感知维度,移动机器人的未来发展前景展望
在国内众多移动机器人厂家纷纷将目光投向下游市场时,迈尔微视却坚守在上游最核心的移动机器人视觉感知技术领域。正如陈俊明,迈尔微视总裁助理所言:“工...
-
2024-04-25

迈尔微视移动机器人3D视觉导航系统 AGV导航 V系列相机
浙江迈尔微视科技有限公司,一家专注于移动机器人导航领域的创新企业,倾力打造了一款高性能深度相机。这款相机不仅拥有1-12米的超广测量范围,更凭借...
-
2024-04-25

迈尔微视3D视觉系统解决方案 机器人3D视觉定位系统
针对散乱无序的工件堆放,我们设计了一款创新的3D智能抓取系统,助力机器人实现高效精准的抓取。该系统通过精确的3D数据扫描,实现工件的三维准确定位...
-
2024-04-25

郑卫军:3D视觉感知,机器人的“眼睛”
4月16日,人形机器人多传感器融合产业投资CEO论坛在国泰君安陆家嘴旗舰店成功举办。迈尔微视MRDVS总经理郑卫军受邀出席并发表《视觉传感器技术...
-
2024-04-22

迈尔微视:详解3D视觉定位系统的工作流程
3D视觉定位系统的工作流程可以概括为以下几个步骤:首先,系统通过摄像头捕捉目标物体的图像,这一步骤至关重要,因为它为后续的识别与定位提供了基础数...
-
2024-04-17
3D视觉系统的设计及其应用
一、概述3D视觉系统是一种用于测量和重建三维物体的技术,其应用范围广泛,包括制造业、医疗、文化遗产保护、机器人和无人驾驶等领域。本文将从系统设计...
-
2024-04-17
AGV避障技术为现代仓储和物流行业带来了革命性的变革
AGV避障技术,是现代物流仓储和工业自动化领域中的一项革命性技术。这种技术能够让自动导引车(AGV)在复杂的仓库环境中,像拥有智慧的生物一样,自...
-
2024-04-17

TOF相机:3D深度视觉对接定位避障相机巡检移动工业机器人的应用
TOF相机,即飞行时间相机,是一种基于3D深度视觉技术的对接定位避障相机。随着科技的不断发展,TOF相机在巡检移动工业机器人领域的应用日益广泛,...
-
2024-04-17

迈尔微视MRDVS:机器人避障的原理
机器人避障的艺术,融合了尖端科技与自然界的智慧。这一过程如同一只矫健的山羊,在崎岖的山路上巧妙避开每一个障碍,轻盈而自如。首先,激光雷达如同山羊...
-
2024-04-17

迈尔微视喜获LeadeRobot2024年度人形机器人产业服务奖
4月9-10日,首届中国人形机器人产业大会暨具身智能峰会在北京海淀区召开,迈尔微视受邀出席峰会并获得LeadeRobot2024年度人形机器人产...
-
2024-04-11

2024开山之作,迈尔微视MRDVS发布顶视导航相机V1 Pro
1月15日,迈尔微视MRDVS正式发布顶视导航相机V1 Pro。作为迈尔微视全新旗舰导航相机,V1 Pro凭借软、硬件双重升级,进一步提升导航精...
-
2024-01-15

中国移动机器人年会开幕,迈尔微视携手AGV/AMR企业迈向2024新里程
12月13日上午,“大象无形 · 逆势跃迁” ——2023中国移动机器人(AGV/AMR)产业发展年会在东莞盛大开幕。中国移动机器人产业链上下游...
-
2023-12-14

荣耀见证 | 迈尔微视MRDVS获全球高层次人才创业大赛总决赛二等奖
迈尔微视MRDVS再传喜讯,继苏州城市赛后获总决赛二等奖!12月11日至12日,第六届湖州吴兴全球高层次人才创业大赛总决赛在湖州吴兴如期举办。经...
-
2023-12-12

会议预告 | 迈尔微视MRDVS将出席2023中国移动机器人(AGV/AMR)产业发展年会
12月13日,“大象无形·逆势跃迁”2023中国移动机器人(AGV/AMR)产业发展年会将在观澜湖高尔夫球会·东莞国际会议中心启幕。迈尔微视全系...
-
2023-12-07
荣耀见证 | 迈尔微视MRDVS获全球高层次人才创业大赛苏州城市赛一等奖!
迈尔微视MRDVS再传喜讯,荣获全球高层次人才创业大赛苏州城市赛一等奖!12月1日,“凤栖吴兴·创见未来”第六届湖州吴兴全球高层次人才创业大赛苏...
-
2023-12-05

iREX 2023丨亮剑!迈尔微视MRDVS硬核新品首度亮相,加速迈向国际化
11月29日,全球影响力最大的机器人盛会——2023 iREX东京国际机器人展览会在Tokyo Big Sight隆重揭幕。迈尔微视作为移动机器...
-
2023-12-04

迈尔微视MRDVS斩获 “年度创新技术”金球奖!
11月28-29日,2023高工移动机器人年会暨高工金球奖颁奖典礼在合肥成功举办,迈尔微视荣获2023高工移动机器人“年度创新技术金球奖”。总经...
-
2023-12-04

迈尔微视MRDVS与您共赴移动机器人年度盛会
11月28-29日,2023(第四届)高工移动机器人年会将在合肥举办。迈尔微视总经理郑卫军将在大会上发表主题演讲,更有今年发布的重磅新品参与现场...
-
2023-11-27

DMP2023 | 迈尔微视MRDVS邀您共赴“大湾区工博会”
11月27~30日,2023年大湾区工业博览会(DMP)将在深圳国际会展中心(宝安)举办,移动机器人3D视觉专家迈尔微视MRDVS将携3D视觉+...
-
2023-11-27

iREX 2023丨3D视觉导航新品首发,迈尔微视MRDVS邀您相聚东京国际机器人展
11月29日-12月2日,2023年日本东京国际机器人展览会(iREX)将在日本东京国际展览中心Tokyo Big Sight盛大举办。移动机器...
-
2023-11-22

2023工博会 | 迈尔微视(MRDVS)将发布两款AMR专用3D视觉传感器
第23届中国国际工业博览会将于9月19日启幕,移动机器人3D视觉专家迈尔微视(MRDVS)将携移动机器人3D视觉解决方案亮相,并在展会期间发布两...
-
2023-09-05
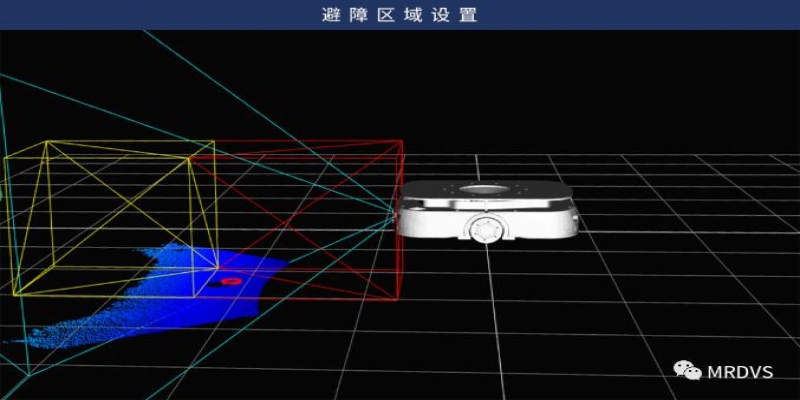
3D感知+AI决策,迈尔微视(MRDVS)助推移动机器人安全再提升
避障是移动机器人在复杂工业场景确保安全运行所不可或缺的核心功能。此问题分为障碍物探测与避障决策两个关键部分,只有做到“双剑合璧”才能构建完整的A...
-
2023-08-30
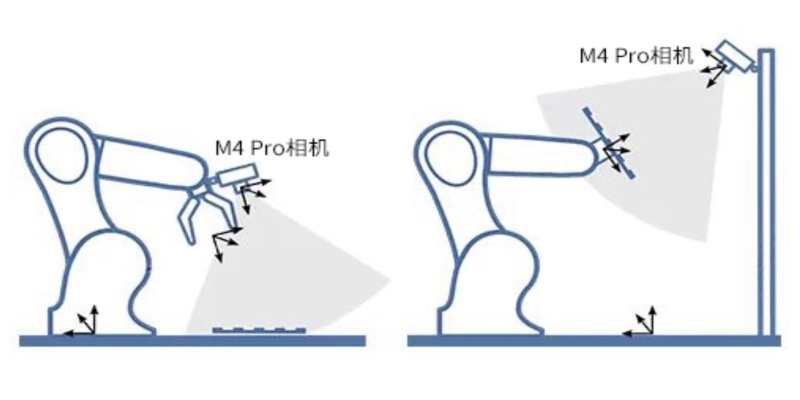
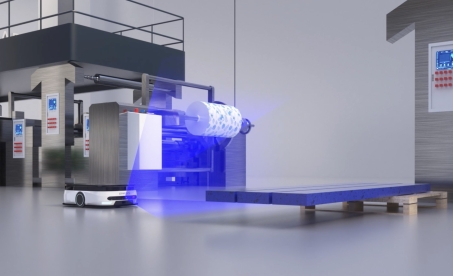
成本降低50%!迈尔微视(MRDVS)超高性价比软包拆垛方案
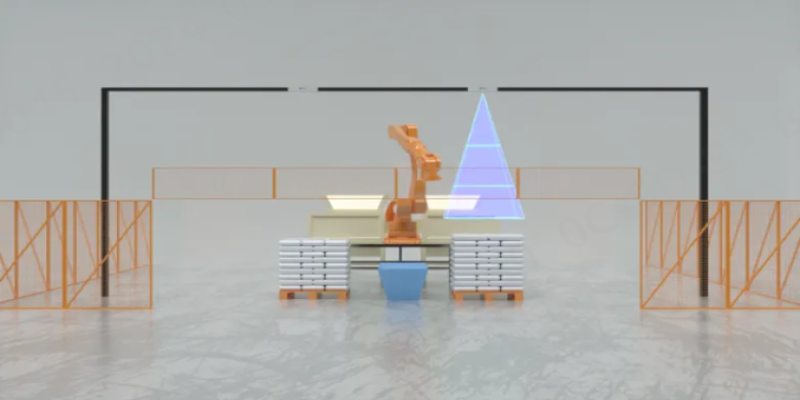
迈尔微视将旗舰机型M4 Pro硬件与自研AI算法优势深度融合,实现软包快速识别、AI分割、精准定位,计算最佳抓取点,完成对机械臂的引导。
-
2023-08-24
迈尔微视(MRDVS)荣登2022余杭数字经济“群英榜”
迈尔微视(MRDVS)《高分辨率大成像范围的3D视觉传感器的研发》荣登余杭区数字经济“群英榜”,获得“十大数字经济创新技术”荣誉。
-
2023-08-24

迈尔微视(MRDVS)首度公开亮相
6月30日,2023(第四届)高工移动机器人产业峰会在杭州滨江开元名都大酒店启幕。移动机器人专用视觉传感器和解决方案提供商——迈尔微视首度公开亮...
-
2023-08-10

3D视觉+AI算法,迈尔微视(MRDVS)智能托盘对接方案
在智能物流系统中,无人叉车(AGV叉车)不仅需要处理基本的导航问题,例如自主定位、规划安全路径、导航至目标点等,更需要实现托盘识别和定位、料笼堆...
-
2023-08-10

迈尔微视邀您共赴2023中国机器视觉展
机器人技术提升离不开各类传感器的加持。移动机器人的传感器在历经磁钉、磁条、二维码、激光雷达之后,开始进入新一轮技术升级——3D视觉感知。7月11...
-
2023-08-10

Vision China上海开展,迈尔微视(MRDVS)首秀展实力
7月11日,Vision China 2023中国机器视觉展在上海国家会展中心盛大启幕,迈尔微视(MRDVS)迎来展会首秀。
-
2023-08-10

迈尔微视(MRDVS)总经理专访:做移动机器人的“眼睛”
随着工业4.0和智能制造时代的到来,机器视觉逐渐成为智能制造的关键技术之一。其中,由于3D机器视觉增加了三维空间的深度信息,可以更全面地记录真实...
-
2023-08-10

3D视觉料笼堆叠方案,以硬实力助力柔性制造
让AGV具备料笼、托盘等精确对接的能力是移动机器人视觉领域的刚性需求,不仅能提升移动机器人的作业效率,还能通过移动机器人在不同工作站的准确对接,...
-
2023-08-10

迈尔微视出席2023高工移动机器人产业峰会
6月30日,2023(第四届)高工移动机器人产业峰会在杭州滨江开元名都大酒店启幕。移动机器人专用视觉传感器和解决方案提供商——迈尔微视首度公开亮...
-
2023-07-14

迈尔微视(MRDVS)破解无人叉车3000+库位定位导航难题
追溯移动机器人的发展历程,本质上是从“低端”向“智能”,从“弱感知”向“强感知”快速进阶的过程。机器视觉大有可为伴随着激光雷达技术的进步,激光导...
-
2023-06-25


迈尔微视HS3240工业相机正式发布
迈尔微视正式对外发布全新3D结构光相机WUKONG系列LXPS-HS3240,该相机主要针对袋包、软包拆/码垛研发,并已成功部署于蓝芯智能装车系...
-
2023-06-07
让机器人“看懂”世界,服务世界。
 0
0
专职研发团队
 0
0
标杆服务企业
 0
0
各类企业荣誉
合作客户
已交付商业传感器超10,000台